نیروی محرکه برگشتی (Back EMF) موتور سنکرون آهنربای دائم
۱. میدان الکترومغناطیسی برگشتی چگونه تولید میشود؟
تولید نیروی الکتروموتور معکوس به راحتی قابل درک است. اصل این است که هادی خطوط مغناطیسی نیرو را قطع میکند. تا زمانی که حرکت نسبی بین این دو وجود داشته باشد، میدان مغناطیسی میتواند ثابت باشد و هادی آن را قطع کند، یا هادی میتواند ثابت باشد و میدان مغناطیسی حرکت کند.
برای موتورهای سنکرون آهنربای دائم، سیمپیچهای آنها روی استاتور (هادی) و آهنرباهای دائم روی روتور (میدان مغناطیسی) ثابت هستند. هنگامی که روتور میچرخد، میدان مغناطیسی تولید شده توسط آهنرباهای دائم روی روتور میچرخد و توسط سیمپیچهای روی استاتور قطع میشود و نیروی الکتروموتور برگشتی در سیمپیچها ایجاد میکند. چرا به آن نیروی الکتروموتور برگشتی میگویند؟ همانطور که از نامش پیداست، جهت نیروی الکتروموتور برگشتی E خلاف جهت ولتاژ ترمینال U است (همانطور که در شکل 1 نشان داده شده است).
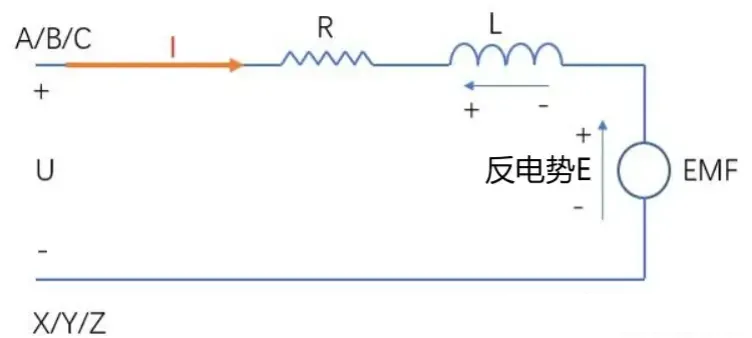
شکل ۱
۲. چه رابطهای بین نیروی محرکه برگشتی (Back EMF) و ولتاژ ترمینال وجود دارد؟
از شکل ۱ میتوان دریافت که رابطه بین نیروی الکتروموتور معکوس و ولتاژ ترمینال تحت بار به صورت زیر است:
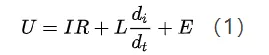
آزمایش نیروی محرکه الکتریکی معکوس معمولاً در شرایط بدون بار، بدون جریان و با سرعت 1000 دور در دقیقه انجام میشود. به طور کلی، مقدار 1000 دور در دقیقه به عنوان ضریب نیروی محرکه الکتریکی معکوس = میانگین مقدار نیروی محرکه الکتریکی معکوس/سرعت تعریف میشود. ضریب نیروی محرکه الکتریکی معکوس یک پارامتر مهم موتور است. در اینجا باید توجه داشت که نیروی محرکه الکتریکی معکوس تحت بار قبل از اینکه سرعت پایدار شود، دائماً در حال تغییر است. از فرمول (1) میتوانیم بدانیم که نیروی محرکه الکتریکی معکوس تحت بار کمتر از ولتاژ ترمینال است. اگر نیروی محرکه الکتریکی معکوس بزرگتر از ولتاژ ترمینال باشد، به یک ژنراتور تبدیل میشود و ولتاژ را به بیرون خروجی میدهد. از آنجایی که مقاومت و جریان در کار واقعی کوچک هستند، مقدار نیروی محرکه الکتریکی معکوس تقریباً برابر با ولتاژ ترمینال است و توسط مقدار نامی ولتاژ ترمینال محدود میشود.
۳. معنای فیزیکی نیروی الکتروموتور معکوس
تصور کنید اگر نیروی محرکه الکتریکی معکوس وجود نداشت چه اتفاقی میافتاد؟ از معادله (1) میتوانیم ببینیم که بدون نیروی محرکه الکتریکی معکوس، کل موتور معادل یک مقاومت خالص است و به وسیلهای تبدیل میشود که گرمای زیادی تولید میکند، که برخلاف تبدیل انرژی الکتریکی به انرژی مکانیکی توسط موتور است. در معادله تبدیل انرژی الکتریکی UIt انرژی الکتریکی ورودی است، مانند انرژی الکتریکی ورودی به باتری، موتور یا ترانسفورماتور؛ I2Rt انرژی اتلاف گرما در هر مدار است که نوعی انرژی اتلاف گرما است، هر چه کوچکتر باشد بهتر است؛ تفاوت بین انرژی الکتریکی ورودی و انرژی الکتریکی اتلاف گرما، انرژی مفید مربوط به نیروی الکتروموتور معکوس است.
UIt انرژی الکتریکی ورودی است، مانند انرژی الکتریکی ورودی به باتری، موتور یا ترانسفورماتور؛ I2Rt انرژی اتلاف گرما در هر مدار است که نوعی انرژی اتلاف گرما است، هر چه کوچکتر باشد بهتر است؛ تفاوت بین انرژی الکتریکی ورودی و انرژی الکتریکی اتلاف گرما، انرژی مفید مربوط به نیروی الکتروموتور معکوس است. به عبارت دیگر، نیروی محرکه الکتریکی برگشتی برای تولید انرژی مفید استفاده میشود و با اتلاف گرما رابطه معکوس دارد. هرچه انرژی اتلاف گرما بیشتر باشد، انرژی مفید قابل دستیابی کمتر است. از نظر عینی، نیروی محرکه الکتریکی برگشتی انرژی الکتریکی را در مدار مصرف میکند، اما «تلفات» محسوب نمیشود. بخشی از انرژی الکتریکی مربوط به نیروی محرکه الکتریکی برگشتی به انرژی مفید برای تجهیزات الکتریکی مانند انرژی مکانیکی موتورها، انرژی شیمیایی باتریها و غیره تبدیل میشود.
به عبارت دیگر، نیروی محرکه الکتریکی برگشتی برای تولید انرژی مفید استفاده میشود و با اتلاف گرما رابطه معکوس دارد. هرچه انرژی اتلاف گرما بیشتر باشد، انرژی مفید قابل دستیابی کمتر است. از نظر عینی، نیروی محرکه الکتریکی برگشتی انرژی الکتریکی را در مدار مصرف میکند، اما «تلفات» محسوب نمیشود. بخشی از انرژی الکتریکی مربوط به نیروی محرکه الکتریکی برگشتی به انرژی مفید برای تجهیزات الکتریکی مانند انرژی مکانیکی موتورها، انرژی شیمیایی باتریها و غیره تبدیل میشود.
از این رو میتوان دریافت که اندازه نیروی الکتروموتور معکوس به معنای توانایی تجهیزات الکتریکی در تبدیل کل انرژی ورودی به انرژی مفید است که نشان دهنده سطح توانایی تبدیل تجهیزات الکتریکی است.
۴. بزرگی نیروی الکتروموتور معکوس به چه چیزی بستگی دارد؟
فرمول محاسبه نیروی الکتروموتور معکوس: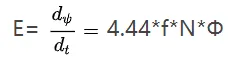
E نیروی محرکه الکتریکی سیمپیچ، ψ شار مغناطیسی، f فرکانس، N تعداد دور و Φ شار مغناطیسی است.
بر اساس فرمول بالا، من معتقدم که احتمالاً همه میتوانند چند عامل را که بر بزرگی نیروی محرکه الکتریکی معکوس تأثیر میگذارند، نام ببرند. در اینجا خلاصهای از مقاله آمده است:
(1) نیروی محرکه برگشتی (Back EMF) برابر با نرخ تغییر شار مغناطیسی است. هرچه سرعت بیشتر باشد، نرخ تغییر بیشتر و نیروی محرکه برگشتی (Back EMF) بیشتر است.
(2) خود شار مغناطیسی برابر است با تعداد دورها ضربدر شار مغناطیسی تک دور. بنابراین، هر چه تعداد دورها بیشتر باشد، شار مغناطیسی بیشتر و نیروی محرکه الکتریکی معکوس (EMF) بیشتر است.
(3) تعداد دورها به طرح سیمپیچ، مانند اتصال ستاره-مثلث، تعداد دور در هر شیار، تعداد فازها، تعداد دندانهها، تعداد شاخههای موازی و طرح گام کامل یا گام کوتاه، مربوط میشود.
(4) شار مغناطیسی تک دور برابر است با نیروی محرکه مغناطیسی تقسیم بر مقاومت مغناطیسی. بنابراین، هرچه نیروی محرکه مغناطیسی بیشتر باشد، مقاومت مغناطیسی در جهت شار مغناطیسی کمتر و نیروی محرکه برگشتی (EMF) بیشتر است.
(5) مقاومت مغناطیسی به هماهنگی شکاف هوایی و قطب-شیار مربوط میشود. هرچه شکاف هوایی بزرگتر باشد، مقاومت مغناطیسی بیشتر و نیروی محرکه برگشتی (EMF) کوچکتر است. هماهنگی قطب-شیار پیچیدهتر است و نیاز به تحلیل خاصی دارد.
(6) نیروی محرکه مغناطیسی به مغناطیس پسماند آهنربا و مساحت مؤثر آهنربا مربوط میشود. هرچه مغناطیس پسماند بیشتر باشد، نیروی محرکه الکترومغناطیسی معکوس (Back EMF) بیشتر است. مساحت مؤثر به جهت مغناطش، اندازه و محل قرارگیری آهنربا مربوط میشود و نیاز به تحلیل خاصی دارد.
(7) مغناطیس پسماند به دما مربوط است. هرچه دما بالاتر باشد، نیروی محرکه برگشتی (EMF) کمتر است.
به طور خلاصه، عوامل مؤثر بر نیروی الکترومغناطیس برگشتی شامل سرعت چرخش، تعداد دور در هر شیار، تعداد فازها، تعداد شاخههای موازی، گام کامل و گام کوتاه، مدار مغناطیسی موتور، طول فاصله هوایی، تطبیق قطب-شیار، مغناطیس پسماند فولاد مغناطیسی، محل قرارگیری و اندازه فولاد مغناطیسی، جهت مغناطیسشدگی فولاد مغناطیسی و دما هستند.
۵. چگونه میتوان اندازه نیروی محرکه الکتریکی معکوس را در طراحی موتور انتخاب کرد؟
در طراحی موتور، نیروی محرکه الکتریکی برگشتی (Back EMF E) بسیار مهم است. اگر نیروی محرکه الکتریکی برگشتی به خوبی طراحی شده باشد (اندازه مناسب، اعوجاج شکل موج کم)، موتور خوب است. نیروی محرکه الکتریکی برگشتی چندین تأثیر عمده بر موتور دارد:
۱. بزرگی نیروی محرکه الکترومغناطیسی برگشتی، نقطه مغناطیسی ضعیف موتور را تعیین میکند و نقطه مغناطیسی ضعیف، توزیع نقشه راندمان موتور را تعیین میکند.
۲. میزان اعوجاج شکل موج EMF برگشتی، بر گشتاور ریپل موتور و نرمی خروجی گشتاور هنگام کار موتور تأثیر میگذارد.
۳. بزرگی نیروی محرکه الکتریکی معکوس (Back EMF) مستقیماً ضریب گشتاور موتور را تعیین میکند و ضریب نیروی محرکه الکتریکی معکوس (Back EMF) متناسب با ضریب گشتاور است.
از این رو، میتوان تناقضات زیر را در طراحی موتور به دست آورد:
الف) وقتی نیروی محرکه الکتریکی معکوس (EMF) بزرگ باشد، موتور میتواند گشتاور بالایی را در جریان محدود کننده کنترل کننده در ناحیه عملکرد سرعت پایین حفظ کند، اما نمیتواند گشتاور را در سرعت بالا تولید کند و حتی نمیتواند به سرعت مورد انتظار برسد.
ب. وقتی نیروی محرکه الکتریکی معکوس کوچک است، موتور هنوز در ناحیه سرعت بالا ظرفیت خروجی دارد، اما گشتاور را نمیتوان در همان جریان کنترلکننده در سرعت پایین به دست آورد.
۶. تأثیر مثبت نیروی محرکه الکترومغناطیسی معکوس بر موتورهای آهنربای دائم.
وجود نیروی محرکه الکترومغناطیسی معکوس برای عملکرد موتورهای آهنربای دائم بسیار مهم است. این نیرو میتواند مزایا و عملکردهای خاصی را برای موتورها به ارمغان بیاورد:
الف) صرفهجویی در مصرف انرژی
نیروی محرکه الکترومغناطیسی معکوس تولید شده توسط موتورهای آهنربای دائمی میتواند جریان موتور را کاهش دهد و در نتیجه باعث کاهش تلفات توان، کاهش اتلاف انرژی و دستیابی به هدف صرفهجویی در انرژی شود.
ب. افزایش گشتاور
نیروی محرکه الکتریکی معکوس (Back EMF) در خلاف جهت ولتاژ منبع تغذیه است. وقتی سرعت موتور افزایش مییابد، نیروی محرکه الکتریکی معکوس نیز افزایش مییابد. ولتاژ معکوس، اندوکتانس سیمپیچ موتور را کاهش میدهد و در نتیجه جریان افزایش مییابد. این امر به موتور اجازه میدهد گشتاور اضافی تولید کند و عملکرد توان موتور را بهبود بخشد.
ج. کاهش سرعت معکوس
پس از اینکه موتور آهنربای دائم قدرت خود را از دست میدهد، به دلیل وجود نیروی محرکه الکتریکی معکوس (Back EMF)، میتواند به تولید شار مغناطیسی ادامه دهد و باعث شود روتور به چرخش خود ادامه دهد، که این امر اثر نیروی محرکه الکتریکی معکوس با سرعت معکوس را تشکیل میدهد، که در برخی کاربردها مانند ماشینآلات و سایر تجهیزات بسیار مفید است.
به طور خلاصه، نیروی محرکه الکتریکی معکوس (Back EMF) یک عنصر ضروری در موتورهای آهنربای دائم است. این نیرو مزایای زیادی برای موتورهای آهنربای دائم به همراه دارد و نقش بسیار مهمی در طراحی و ساخت موتورها ایفا میکند. اندازه و شکل موج نیروی محرکه الکتریکی معکوس به عواملی مانند طراحی، فرآیند تولید و شرایط استفاده از موتور آهنربای دائم بستگی دارد. اندازه و شکل موج نیروی محرکه الکتریکی معکوس تأثیر مهمی بر عملکرد و پایداری موتور دارد.
شرکت تجهیزات الکترومکانیکی آهنربای دائمی آنهویی مینگتنگ (https://www.mingtengmotor.com/)یک تولیدکننده حرفهای موتورهای سنکرون آهنربای دائم است. مرکز فنی ما بیش از ۴۰ پرسنل تحقیق و توسعه دارد که به سه بخش طراحی، فرآیند و آزمایش تقسیم شدهاند و در تحقیق و توسعه، طراحی و نوآوری فرآیند موتورهای سنکرون آهنربای دائم تخصص دارند. با استفاده از نرمافزار طراحی حرفهای و برنامههای طراحی ویژه موتور آهنربای دائم که توسط خود ما توسعه داده شدهاند، در طول فرآیند طراحی و ساخت موتور، اندازه و شکل موج نیروی محرکه الکتریکی برگشتی با توجه به نیازهای واقعی و شرایط کاری خاص کاربر به دقت در نظر گرفته میشود تا عملکرد و پایداری موتور تضمین شده و راندمان انرژی موتور بهبود یابد.
حق چاپ: این مقاله تجدید چاپ شماره عمومی ویچت "电机技术及应用" است، لینک اصلی https://mp.weixin.qq.com/s/e-NaJAcS1rZGhSGNPv2ifw
این مقاله بیانگر دیدگاههای شرکت ما نیست. اگر نظرات یا دیدگاههای متفاوتی دارید، لطفاً ما را اصلاح کنید!
زمان ارسال: 20 آگوست 2024